Open Robotics ROS (Robot Operating System) has emerged as a cornerstone in the field of robotics, providing a flexible framework for writing robot software. It is not merely an operating system in the traditional sense; rather, it serves as a collection of software libraries and tools that facilitate the development of robot applications. With its open-source nature, ROS has garnered a vast community of developers and researchers who contribute to its continuous evolution.
This collaborative environment fosters innovation, allowing users to share code, ideas, and solutions, which accelerates the pace of advancements in robotics. The architecture of ROS is designed to be modular, enabling developers to create complex robotic systems by integrating various components seamlessly. This modularity allows for the easy addition of new functionalities and the reuse of existing code, making it an ideal choice for both academic research and commercial applications.
From autonomous vehicles to drones and industrial robots, ROS provides the necessary tools to control and manage a wide array of robotic systems, making it a powerful ally for anyone venturing into the world of robotics.
Key Takeaways
- Open Robotics ROS is a powerful tool for robot control, providing a flexible and robust framework for developing robotic systems.
- Sensor data processing in Open Robotics ROS allows for the integration and manipulation of data from various sensors, enabling robots to perceive and interact with their environment.
- Path planning in Open Robotics ROS enables robots to navigate the world efficiently and autonomously, making use of algorithms to find the best routes.
- Immersive 3D simulation in Open Robotics ROS brings virtual environments to life, allowing for realistic testing and development of robotic systems.
- Integrating Open Robotics ROS with hardware brings robots to life, enabling them to interact with the physical world and perform tasks.
Understanding Sensor Data Processing in Open Robotics ROS
Effective Sensor Data Processing in Robotics
One of the most critical aspects of robotics is the ability to process sensor data effectively. In Open Robotics ROS, sensor data processing is streamlined through a variety of packages that facilitate the integration of different types of sensors, such as cameras, LiDAR, and IMUs (Inertial Measurement Units). These sensors provide essential information about the robot’s environment, enabling it to make informed decisions and navigate effectively.
Real-Time Data Processing for Robotic Applications
The ability to process this data in real-time is crucial for applications ranging from autonomous navigation to robotic manipulation. ROS employs a publish-subscribe messaging model that allows sensors to publish their data to a central topic. Other components of the robotic system can then subscribe to these topics to receive updates.
Enhanced System Responsiveness and Integration
This architecture not only simplifies the integration of multiple sensors but also enhances the system’s responsiveness. For instance, a robot equipped with a camera and LiDAR can simultaneously process visual and spatial data, allowing it to create a comprehensive understanding of its surroundings. This capability is vital for tasks such as obstacle avoidance and path planning, where timely and accurate data processing can mean the difference between success and failure.
Path planning is a fundamental component of robotic navigation, enabling robots to move from one point to another while avoiding obstacles. Open Robotics ROS offers a variety of algorithms and tools for path planning, allowing developers to choose the most suitable approach for their specific application. These algorithms range from simple techniques like A* and Dijkstra’s algorithm to more complex methods such as Rapidly-exploring Random Trees (RRT) and Probabilistic Roadmaps (PRM).
Each algorithm has its strengths and weaknesses, making it essential for developers to understand their options when designing a navigation system. In addition to the algorithms themselves, ROS provides simulation environments where developers can test their path planning strategies in virtual settings before deploying them on physical robots. This capability is invaluable for refining algorithms and ensuring that they perform well under various conditions.
By simulating different scenarios, developers can identify potential pitfalls and optimize their path planning strategies accordingly. The combination of robust algorithms and simulation tools makes Open Robotics ROS an indispensable resource for anyone looking to implement effective navigation solutions in their robotic systems.
Immersive 3D Simulation in Open Robotics ROS: Bringing Virtual Environments to Life
| Metrics | Data |
|---|---|
| Simulation Environment | Open Robotics ROS |
| Simulation Type | Immersive 3D |
| Objective | Bringing Virtual Environments to Life |
The importance of simulation in robotics cannot be overstated, and Open Robotics ROS excels in this area with its powerful simulation tools. One of the standout features is Gazebo, an open-source 3D robotics simulator that integrates seamlessly with ROS. Gazebo allows developers to create realistic virtual environments where they can test their robots without the risks associated with real-world experimentation.
This capability is particularly beneficial for developing complex robotic systems that require extensive testing before deployment.
The ability to visualize robot interactions within a 3D space enhances understanding and facilitates debugging processes.
Moreover, Gazebo supports multi-robot simulations, enabling developers to explore collaborative scenarios where multiple robots work together in a shared environment. This immersive experience not only accelerates development but also fosters creativity as developers can experiment with innovative ideas in a safe and controlled setting.
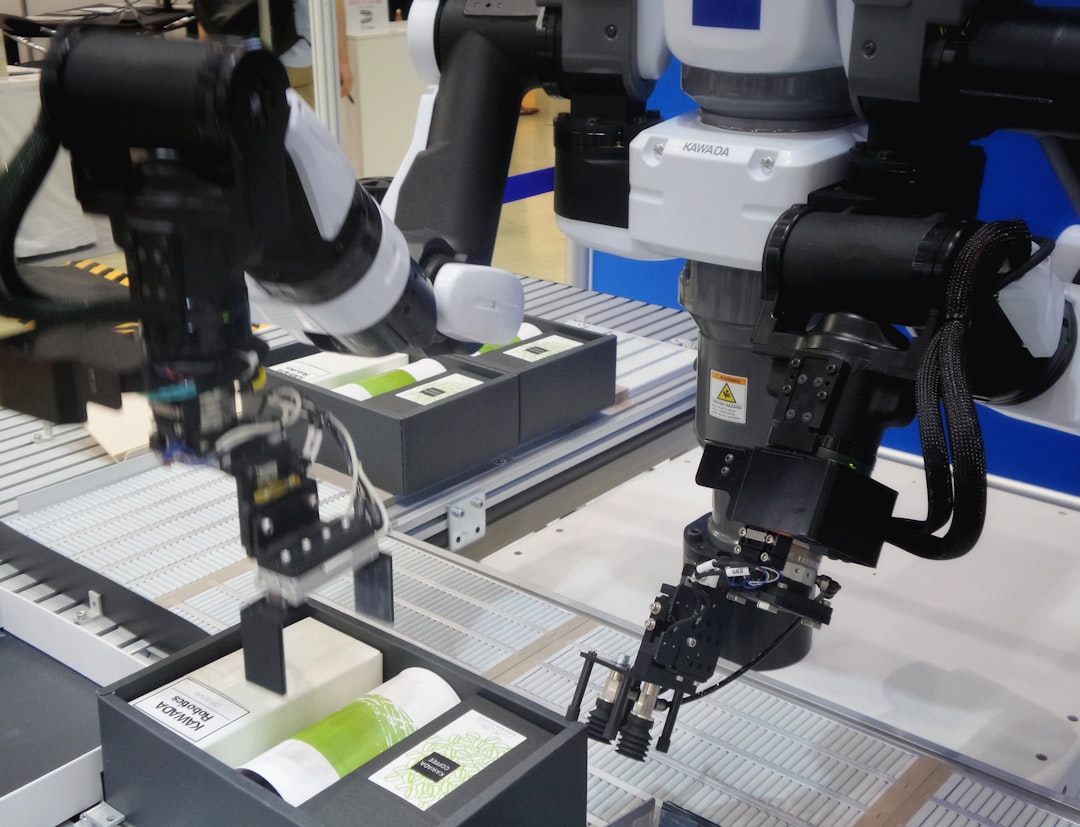
Integrating Open Robotics ROS with Hardware: Making Robots Come Alive
While simulation is crucial for development, the ultimate goal is to bring robots to life by integrating them with hardware components. Open Robotics ROS provides extensive support for various hardware platforms, making it easier for developers to connect their software with physical robots. The framework includes drivers for numerous sensors and actuators, allowing seamless communication between software and hardware.
This integration is vital for translating algorithms into real-world actions, enabling robots to perform tasks effectively. The process of hardware integration often involves configuring communication protocols such as Serial, I2C, or CAN bus, which ROS handles adeptly through its hardware abstraction layer. This layer allows developers to focus on high-level functionalities without getting bogged down by low-level hardware detAIls.
Furthermore, ROS supports various programming languages, including C++ and Python, providing flexibility in how developers choose to implement their solutions. This versatility ensures that whether you are working on a simple robot or a complex autonomous system, Open Robotics ROS can help you bridge the gap between software and hardware seamlessly.
Enhancing Robot Performance with Machine Learning in Open Robotics ROS

Enhancing Robot Capabilities
By leveraging machine learning algorithms, developers can empower their robots to learn from experience and adapt to new situations autonomously, thereby enhancing their capabilities.
Training Robots in Complex Environments
Reinforcement learning can be employed to train robots in complex environments where traditional programming may fall short. By simulating various scenarios within Gazebo or other simulation environments, developers can allow their robots to learn optimal behaviors through trial and error.
Implementing Sophisticated Models
ROS supports popular machine learning frameworks such as TensorFlow and PyTorch, making it easier for developers to implement sophisticated models that can improve perception, decision-making, and overall performance. The synergy between machine learning and robotics opens up exciting possibilities for creating intelligent systems capable of tackling real-world challenges.
Collaborative Robotics with Open Robotics ROS: Working Together for a Smarter Future
The future of robotics lies in collaboration—both among robots themselves and between humans and robots. Open Robotics ROS is at the forefront of this movement by providing tools that facilitate cooperative behaviors among multiple robotic agents. Collaborative robotics (cobots) are designed to work alongside humans or other robots safely and efficiently, enhancing productivity across various industries.
ROS enables developers to implement communication protocols that allow robots to share information about their states and intentions. This capability is crucial for coordinating actions in multi-robot systems where teamwork is essential for achieving common goals. For example, in warehouse automation, multiple robots can work together to transport goods efficiently by communicating their positions and tasks in real-time.
The collaborative features offered by Open Robotics ROS not only improve operational efficiency but also pave the way for more sophisticated applications in fields such as healthcare, agriculture, and manufacturing.
The Future of Robotics: Exploring New Frontiers with Open Robotics ROS
As we look ahead, the potential for robotics powered by Open Robotics ROS seems limitless. The ongoing advancements in AI, machine learning, and sensor technology will continue to shape the landscape of robotics in profound ways. With its robust framework and active community support, ROS is well-positioned to adapt to these changes and drive innovation forward.
Future developments may include enhanced capabilities for human-robot interaction, allowing robots to understand natural language commands or interpret human emotions through advanced sensors and AI algorithms. Additionally, as autonomous systems become more prevalent in everyday life—from self-driving cars to delivery drones—the need for reliable software frameworks like Open Robotics ROS will only grow stronger. By embracing these emerging technologies and fostering collaboration within the robotics community, we can unlock new frontiers that will redefine how we interact with machines and each other in an increasingly automated world.
In conclusion, Open Robotics ROS stands as a powerful tool that empowers developers and researchers alike to push the boundaries of what is possible in robotics. Its modular architecture, extensive libraries for sensor data processing, path planning capabilities, immersive simulation environments, hardware integration support, machine learning enhancements, collaborative features, and future-oriented vision make it an indispensable resource in the ever-evolving field of robotics. As we continue to explore new frontiers together with this remarkable framework, the possibilities are truly endless.
For those interested in the intersection of robotics and advanced simulation technologies, the Robot Operating System (ROS) by Open Robotics offers a comprehensive framework for robot control, sensor data processing, path planning, and 3D simulation. While exploring these topics, you might find additional insights in related fields such as the metaverse, where similar technologies are applied in virtual environments. A particularly relevant article that discusses various platforms and ecosystems within the metaverse, which could parallel some concepts in ROS, can be found here: Overview of Major Metaverse Platforms. This article provides a broad understanding of how different platforms handle complex simulations and environments, which could be insightful for those working with ROS in robotics.
FAQs
What is Open Robotics ROS?
Open Robotics ROS, or Robot Operating System, is a flexible framework for writing robot software. It is a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms.
What are the key features of Open Robotics ROS?
Open Robotics ROS provides a wide range of functionalities including robot control, sensor data processing, path planning, 3D simulation, and more. It also offers a large set of libraries and tools for building and managing complex robotic systems.
What is the role of Open Robotics ROS in robot control?
Open Robotics ROS provides a framework for controlling robots, including interfacing with hardware, executing motion control, and managing sensor data. It allows for the development of robot control algorithms and the integration of various sensors and actuators.
How does Open Robotics ROS handle sensor data processing?
Open Robotics ROS provides tools for processing sensor data, such as filtering, transformation, and visualization. It supports a wide range of sensors including cameras, lidar, IMUs, and more, and allows for the integration of sensor data into the robot’s decision-making processes.
What is the significance of path planning in Open Robotics ROS?
Open Robotics ROS includes tools for path planning, which is essential for enabling robots to navigate through complex environments. It provides algorithms for generating collision-free paths and executing motion planning for mobile robots and manipulators.
How does Open Robotics ROS support 3D simulation?
Open Robotics ROS includes a powerful 3D simulation environment called Gazebo, which allows for realistic simulation of robots and their environments. It provides a platform for testing and validating robot behaviors in a virtual environment before deploying them on physical robots.








Leave a Reply